Understanding real-world human--object interactions in images is an inherently many-to-many problem, where disentangling fine-grained and concurrent physical contacts is particularly challenging. Existing semantic contact estimation methods are either limited to single-human settings or require object geometry (e.g., meshes) in addition to the input image. Current state-of-the-art method leverages a powerful VLM for category-level semantics, but it still struggle in multi-human scenes and scales poorly at inference time. We introduce Pi-HOC, a single-pass, instance-aware framework for dense 3D semantic contact prediction across all human--object pairs. Given an input image, Pi-HOC detects human and object instances, enumerates all human--object pairs, and represents each pair with a dedicated human--object (HO) token. An InteractionFormer jointly refines HO tokens and image patch features to produce interaction-aware pair representations. A SAM-based contact decoder then predicts dense contact on SMPL human meshes for each pair. On the MMHOI and DAMON datasets, Pi-HOC significantly improves accuracy and localization over state-of-the-art methods while achieving 20x higher throughput. These results establish Pi-HOC as an efficient and scalable solution for dense semantic contact reasoning in complex scenes. We further show that the predicted contacts improve SAM-3D image-to-mesh reconstruction through a test-time optimization procedure and enable referential contact prediction from language queries without additional training.
Pi-HOC achieves state-of-the-art performance on Semantic Contact estimation. We test the method on MMHOI and DAMON datasets.
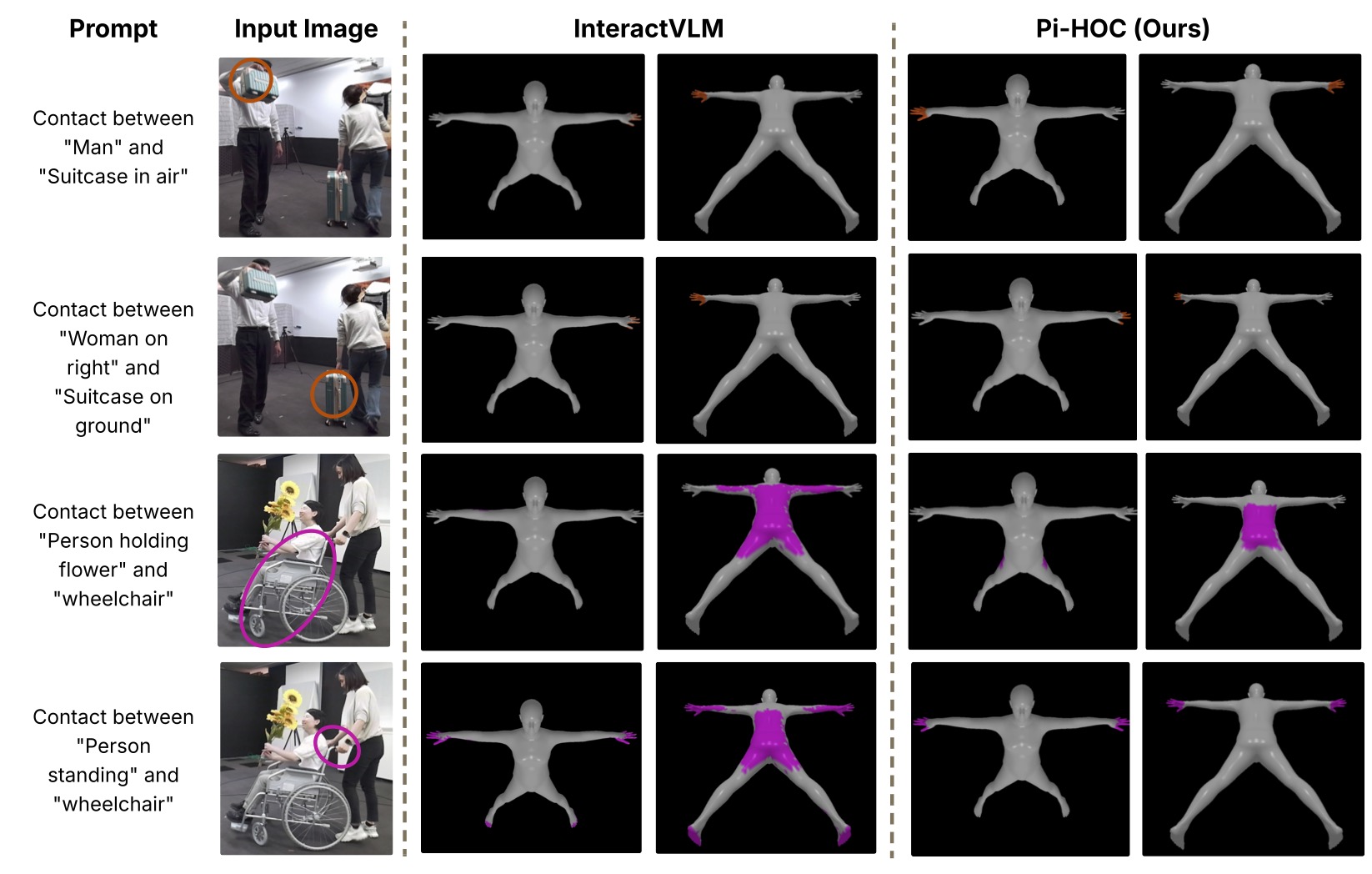
Pi-HOC consistently outperforms InteractVLM across benchmarks, achieving ~17% higher precision on MMHOI and notable gains on DAMON, while maintaining significantly higher inference speed. Unlike InteractVLM, Pi-HOC scales efficiently with increasing human–object pairs, demonstrating a superior balance between accuracy and computational efficiency.